2025 m. gruodį NASA žengė dar vieną nedidelį, bet svarbų žingsnį visiškai autonominių planetos paviršiaus roverių link.
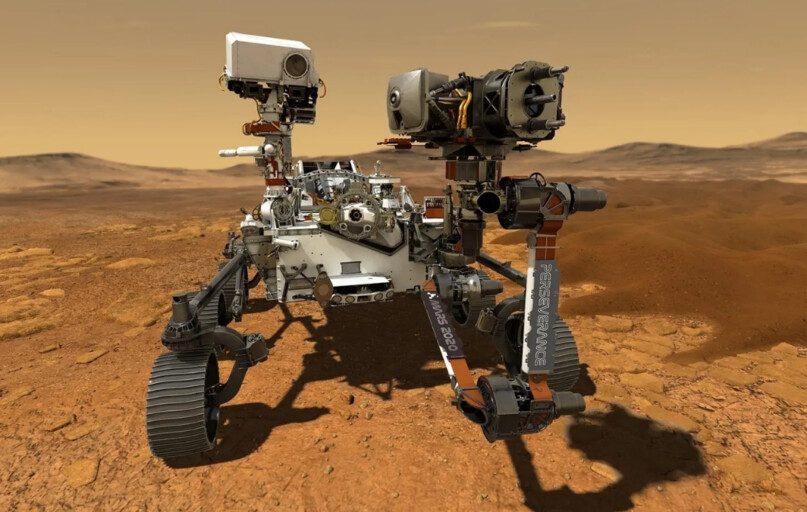
Per demonstracinį bandymą „Perseverance“ komanda pasitelkė dirbtinį intelektą roverio maršruto taškams (angl. waypoints) sugeneruoti. Remdamasis DI sudarytais taškais, „Perseverance“ dvi dienas iš eilės savarankiškai nuvažiavo iš viso 456 metrus, be tiesioginio žmonių valdymo.
„Šis demonstracinis bandymas parodo, kiek pažengė mūsų galimybės, ir praplečia būdus, kaip tyrinėsime kitus pasaulius“, – sakė NASA administratorius Jaredas Isaacmanas.
„Tokios autonominės technologijos gali padėti misijoms veikti efektyviau, lanksčiau reaguoti į sudėtingą reljefą ir padidinti mokslinių duomenų grąžą, kai atstumas nuo Žemės vis didėja. Tai puikus pavyzdys, kaip komandos atsakingai ir apgalvotai taiko naujas technologijas realiose misijose.“
Marsas yra labai toli: signalui iš Žemės iki Marso ir atgal prireikia maždaug 25 minučių. Tai reiškia, kad roveriai neišvengiamai bent dalį laiko turi veikti savarankiškai.
Šis ryšio vėlavimas daro įtaką ir maršrutų planavimui. Roverių „vairuotojai“ Žemėje analizuoja iš Marso gautas nuotraukas bei reljefo duomenis ir sudaro judėjimo planą iš atskirų taškų, kurie paprastai būna išdėstyti ne didesniu kaip 100 metrų atstumu vienas nuo kito.
Parengtas važiavimo planas perduodamas NASA Giliosios kosmoso tinklui (DSN). Iš ten jis persiunčiamas vienam iš Marso palydovų, o šie savo ruožtu perduoda duomenis „Perseverance“ roveriui.
Šio bandymo metu DI analizavo orbitines Marso nuotraukas, gautas Mars Reconnaissance Orbiter palydovo HiRISE kamera, taip pat skaitmeninius reljefo modelius. Dirbtinio intelekto sistema, sukurta remiantis „Anthropic Claude“ pagrindu, atpažino pavojingas vietas: smėlio „spąstus“, riedulių laukus, atviros uolienos plotus ir uolų iškyšas. Tuomet ji sudarė saugesnį maršrutą iš atskirų taškų, leidžiantį šias rizikingas zonas aplenkti.
Vėliau vairavimą perėmė paties roverio autonominio navigavimo sistema. „Perseverance“ turi gerokai daugiau savarankiškumo nei jo pirmtakai: jis geba apdoroti vaizdus ir vykdyti važiavimo planą tuo pat metu, kai juda.
Prieš perduodant DI sugeneruotus maršruto taškus pačiam roveriui, buvo atliktas dar vienas svarbus žingsnis. NASA Reaktyvinio judėjimo laboratorijoje (JPL) yra „Perseverance“ dvynys – „Vehicle System Test Bed“ (VSTB) bandymų roveris, naudojamas vadinamajame Marso kiemo poligone.
Tai inžinerinis modelis, leidžiantis komandai Žemėje iš anksto išbandyti sprendimus ir parengti procedūras realioms situacijoms. Tokie inžineriniai modeliai yra įprasti Marso misijose – JPL turi analogišką roverį ir „Curiosity“ misijai.
„Pagrindiniai generatyvinio DI principai rodo didelį potencialą supaprastinti tris svarbiausius autonominio navigavimo kosmose ramsčius: suvokimą (akmenų, keterų ir kitų kliūčių atpažinimą), lokalizaciją (tikslios padėties nustatymą) ir planavimą bei valdymą (saugiausio kelio parinkimą ir vykdymą)“, – aiškino JPL kosminės robotikos specialistė ir „Perseverance“ inžinierė Vandi Verma.
„Artėjame prie dienos, kai generatyvinis DI ir kiti išmanūs įrankiai padės mūsų paviršiaus roveriams savarankiškai įveikti kilometrų ilgio atstumus, mažins operatorių darbo krūvį ir automatiškai atrinks milžiniškus roverių nuotraukų kiekius, pažymėdami įdomiausius paviršiaus objektus mokslininkams.“
Dirbtinis intelektas sparčiai tampa kasdienybės dalimi ir vis dažniau pasitelkiamas srityse, kur jo nauda ne visada akivaizdi. Tačiau šiuo atveju tai nėra NASA bandymas „vytis madą“ – autonominės navigacijos sistemos kuriamos jau seniai, iš būtinybės. Iš tiesų pagrindinis „Perseverance“ judėjimo būdas ir yra savarankiška vairavimo sistema.
Vis dėlto vienas veiksnių, vis dar ribojančių visiškai autonominį važiavimą, yra netikrumo dėl tikslios roverio padėties augimas laikui bėgant. Kuo ilgiau roveris juda be žmogaus pagalbos, tuo labiau didėja neapibrėžtumas dėl jo buvimo vietos Marso paviršiuje.
Sprendimas – periodiškai tiksliai „pernustatyti“ roverio padėtį žemėlapyje. Šiuo metu tai daro žmonės. Tačiau toks procesas užtrunka, nes reikia viso ryšio ciklo tarp Žemės ir Marso. Dėl to ribojama, kokį atstumą „Perseverance“ gali įveikti visiškai savarankiškai.
NASA/JPL taip pat kuria būdą, kaip „Perseverance“ galėtų pasinaudoti DI savo padėčiai iš naujo nustatyti. Pagrindinis iššūkis – suderinti orbitines nuotraukas su roverio paviršiaus lygio vaizdais. Labai tikėtina, kad DI bus apmokytas šią užduotį atlikti itin tiksliai.
Akivaizdu, kad dirbtinis intelektas artimiausiais metais atliks vis svarbesnį vaidmenį planetų tyrimuose. Kitas Marso roveris gali būti gerokai kitoks nei dabartiniai – su pažangesnėmis autonominio navigavimo galimybėmis ir kitomis DI funkcijomis. Jau kuriamos koncepcijos, pagal kurias iš roverio būtų paleidžiami autonomiškų skraidančių dronų spiečiai, reikšmingai išplečiantys tyrimų zoną Marse. Tokius spiečius valdytų DI, koordinuodamas jų bendrą veiklą.
DI teikiama nauda neapsiriboja vien Marso tyrimais. NASA „Dragonfly“ misija į Saturno palydovą Titaną taip pat plačiai remsis dirbtiniu intelektu – ne tik autonominiam skrydžiui ir navigacijai, bet ir savarankiškam surinktų duomenų atrinkimui bei prioritetų nustatymui.
„Įsivaizduokite išmaniąsias sistemas ne tik Žemėje esančiuose valdymo centruose, bet ir pačiame „pakraštyje“ – roveriuose, sraigtasparniuose, dronuose bei kituose paviršiaus elementuose. Sistemas, apmokytas pagal sukauptas mūsų inžinierių, mokslininkų ir astronautų žinias“, – sakė JPL Tyrimų sistemų biuro vadovas Mattas Wallace’as.
„Tai iš tiesų žaidimo taisykles keičianti technologija, kurios mums reikia, kad sukurtume infrastruktūrą ir sistemas nuolatinei žmonių buveinei Mėnulyje, o vėliau nuvestume JAV į Marsą ir dar toliau.“






